Yui Chun Leung, Leo 梁睿雋
About
I am a Machine Learning Engineer x Full Stack Developer. I have a broad interest in Machine Learning, particularly Robotics and Computer Vision. Below are further information about me. This github.io also acts as my Pensieve (Archive).
More interactive and appealing UI is written in another website with React practice-app.
Collection of MATLAB implementations of Generative Adversarial Networks (GANs) suggested in research papers. This repository contains codes to investigate different architectures of GAN models.
Collection of Python implementations of Robotics and Computer Vision theories.
Work Experiences
Machine Learning Engineer, Faculty AIMachine Learning Engineer, RE5Q
AI Consultant,DreamsAI
Deep Learning Software Engineer Intern, Mathworks
Student Research Assistant, Cambridge University Engineering Department
Final Year Student Research Assistant, Biomedical Ultrasound Group, UCL
Research Intern, Proton Therapy Group, UCL
Educations
MPhil Machine Learning and Machine Intelligence, University of CambridgeBSc Physics with Medical Physics, University College London
Awards
Dean's List 2017-2018, UCL Faculty of EngineeringDepartmental nomination for Faculty Goldsmid medal 2018, UCL MPBE Department
Undergradudate Research Opportunities Scheme 2017, UCL Faculty of Engineering
John Clifton Prize 2015-2016, UCL MPBE Department
MOOCs
Code Foundation for ROS Path, The ConstructTensorFlow in Practice, deeplearning.ai
Robotics Specialization, University of Pennsylvania
Deep Learning Specialization, deeplearning.ai
IBM Data Science Professional Certificate Specialization, IBM
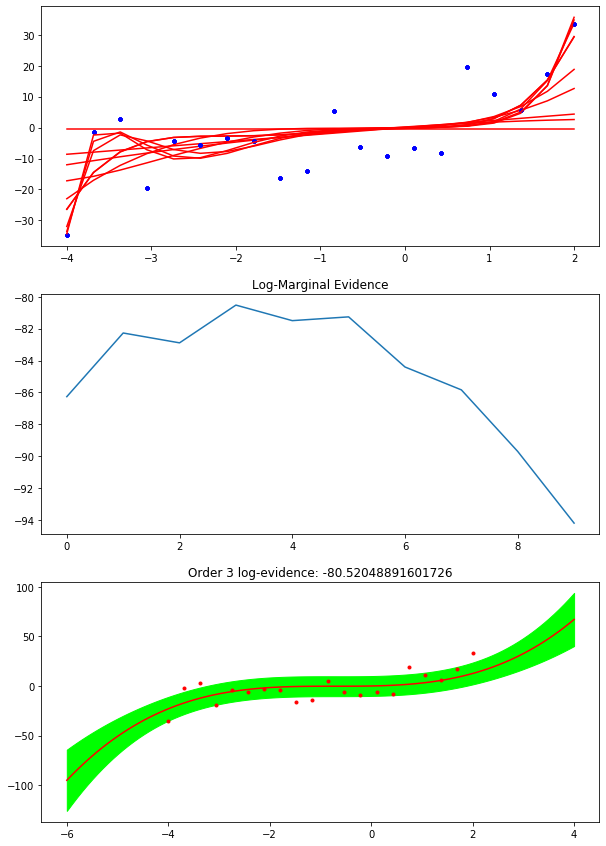
Marginal Likelihood is given by, $$p(\mathbf{y}|\mathbf{x},\mathcal{M}) = \mathcal{N}(\mathbf{y};\mathbf{0},\sigma^2_\mathbf{w}\mathbf{\Phi\Phi^\top}+\sigma^2_\mathbf{n}\mathbf{I})$$
Planetry motion solution is given by, $$u = \frac{m|K|}{L^2}\sqrt{(1+\frac{2EL^2}{mK^2})}\cos\theta -\frac{mK}{L^2}$$ where \(K=-GMm\) and \(L = mr^2\dot{\theta}\).
[22:29 16/08/2021 UK] 1st Anniversary: over 320 posts !!
[18:08 10/04/2021 UK] Adjust Highlights style.
[18:39 13/03/2021 UK] 130 Post Tabs !!!
[18:34 01/01/2021 UK] Add a new highlight section.
[00:36 06/11/2020 UK] Update the first round of mathematical proofs and AI relevant topics.
[03:05 11/10/2020 UK] Implement responsive design for equations and viewport, and update 3rd round content
[01:37 03/10/2020 UK] Update the second round of blog contents
[00:03 22/09/2020 UK] Update the first round of blog contents
[00:14 15/09/2020 UK] Update style version
[22:39 18/08/2020 UK] Add Pin Table.
[20:52 18/08/2020 UK] Testing (Public to Private, failed)
[23:55 16/08/2020 UK] Update common Blog templates, with Highlights and Table of Contents.
[11:15 16/08/2020 UK] Update Blog Tag, adjust gif and image size.
[08:53 16/08/2020 UK] Add LinkedIn and Github Icons with links.
[08:21 16/08/2020 UK] Reorganize the main content page elements, Projects and Qualifications.

Drone Construction
Building drone from scratch, and installing firmware.
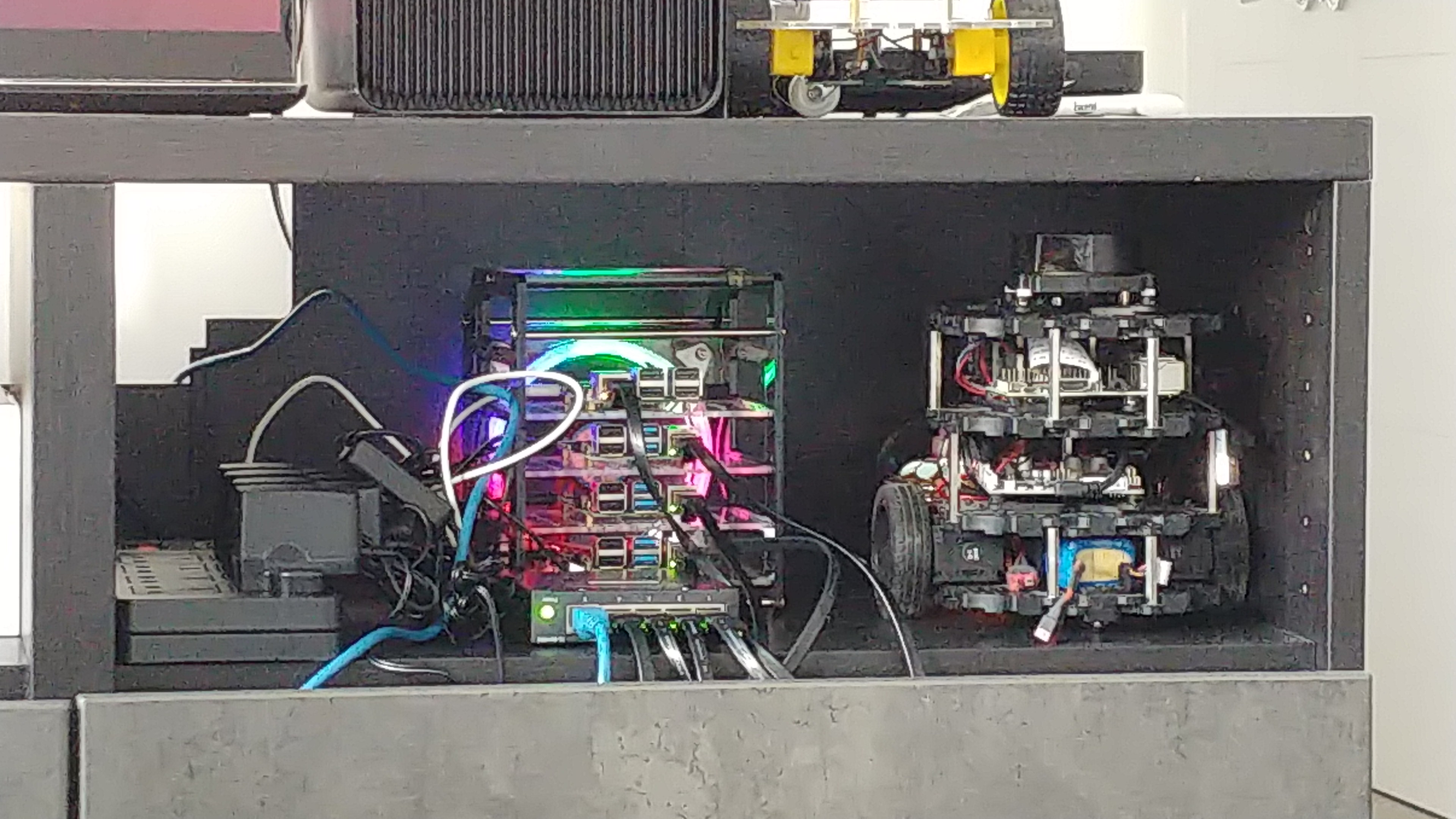
Raspi Cluster
Building raspberry pi cluster for parallel computing.
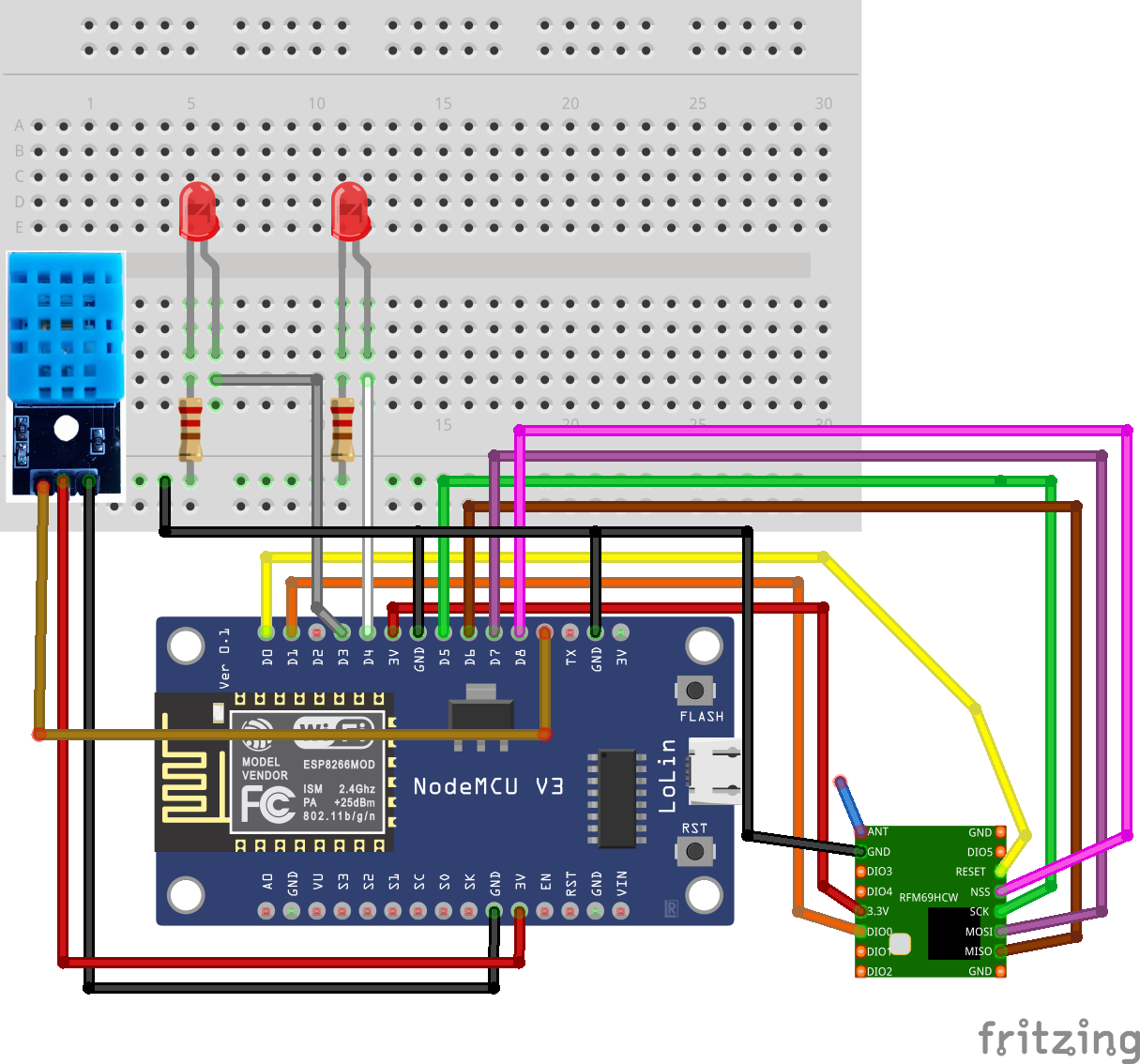
IOT and fritzing
Send data via LORAWAN.
Turtlebot3 and ROS
ROS to control robot.
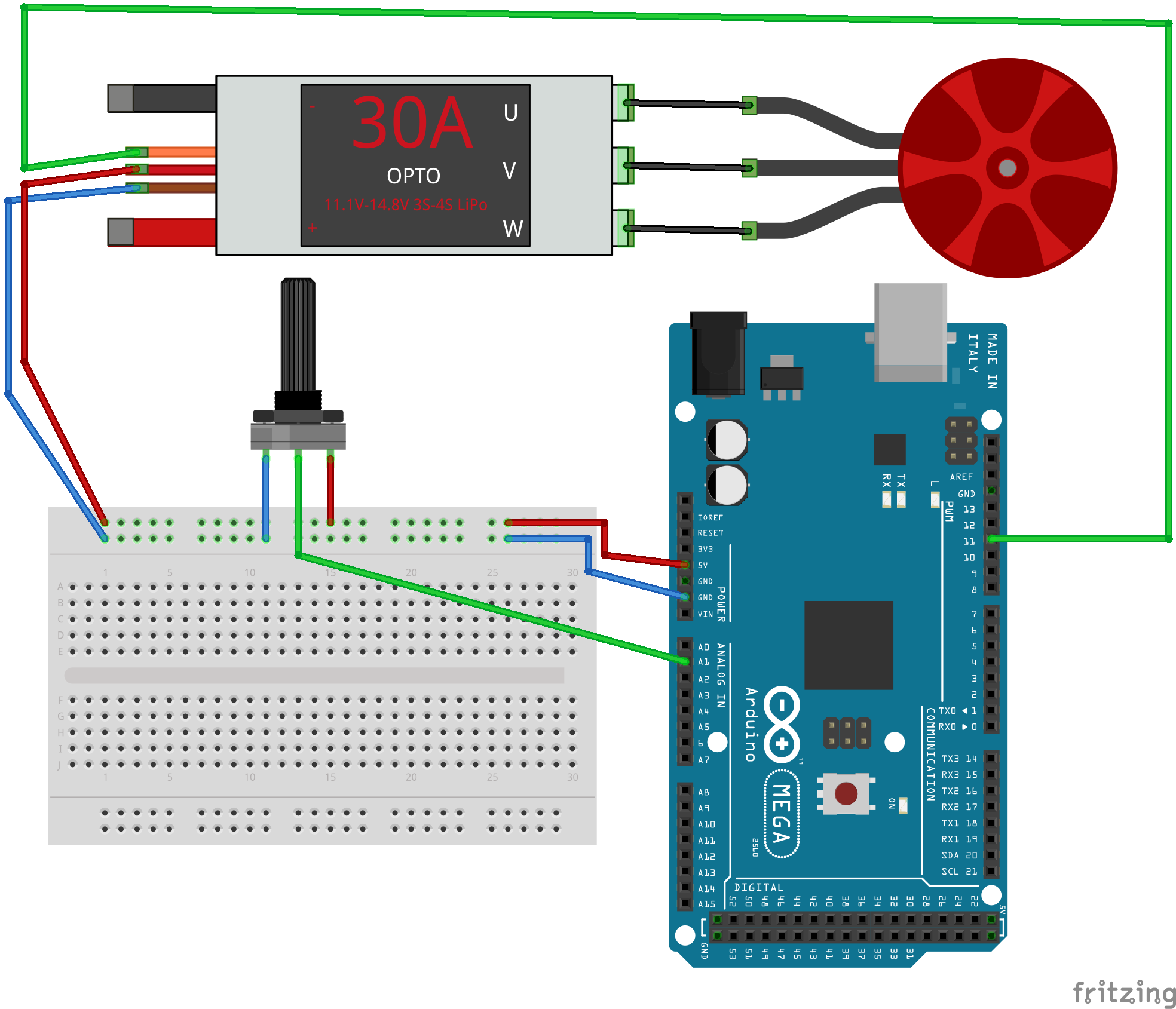
Electronics to control BLDC motor
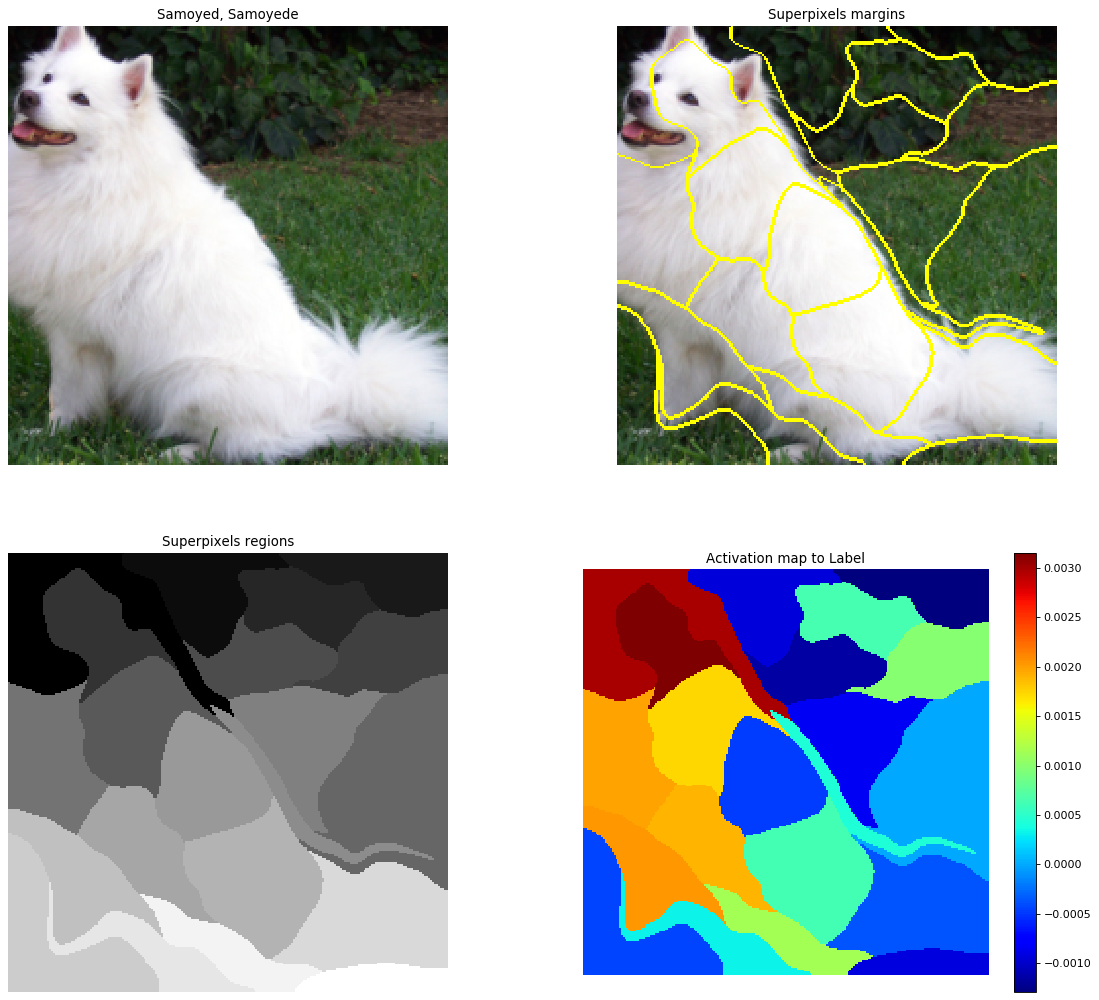
LIME to explain AI model output

React app Full stack development
Build a multifunctional web app for demonstration.
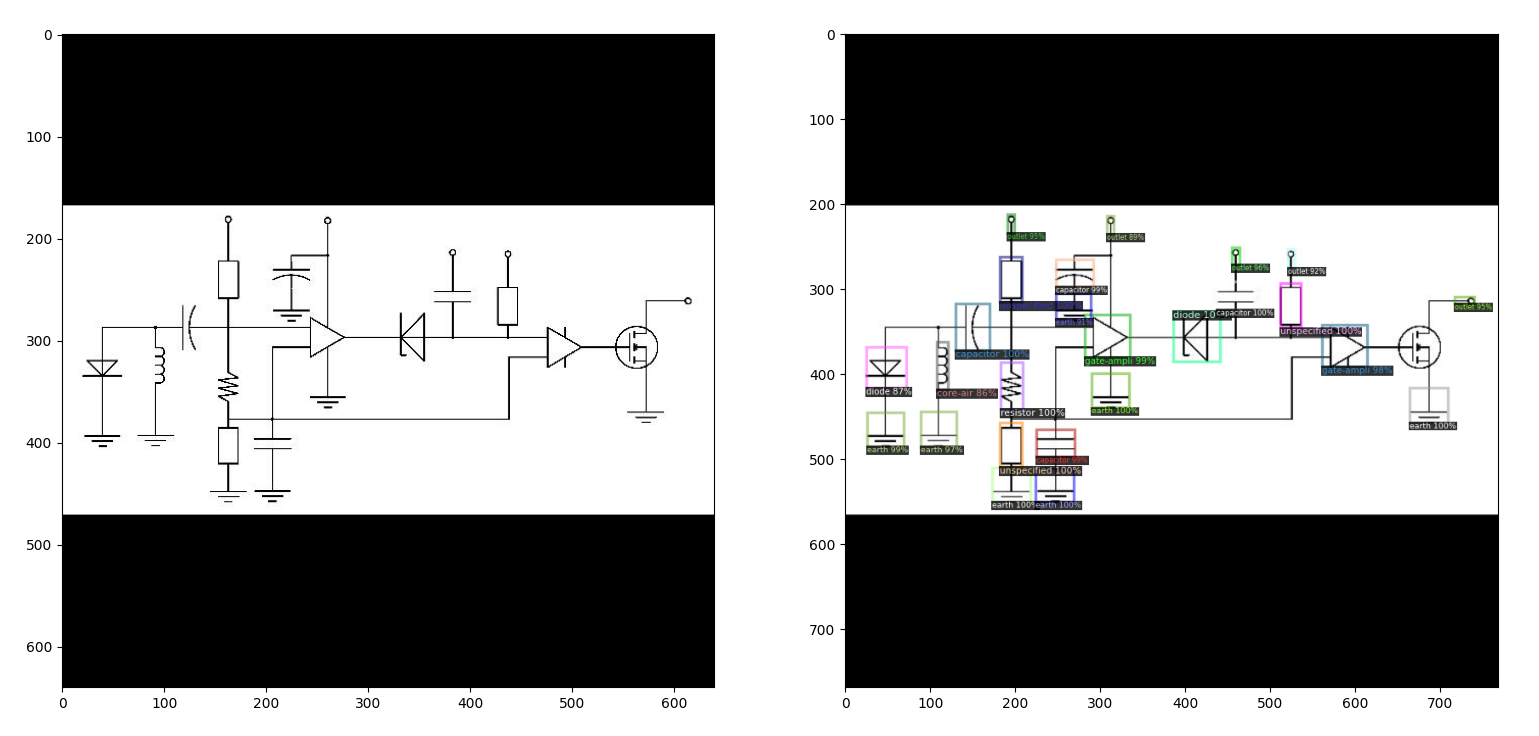
Electric Circuit Symbols segmentation by Yolov5
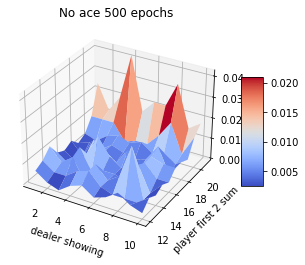
Monte Carlo Methods for Blackjack

Custom built PC for Server and Virtualization
Twin Delay DDPG
Optical Flow with Moneywheel
Estimate the rotational motion of Moneywheel via Optical Flow method.
Matlab-GANs
Recreate variant of GAN models with Matlab deep learning toolbox framework.

Logo Projection with 2D homography
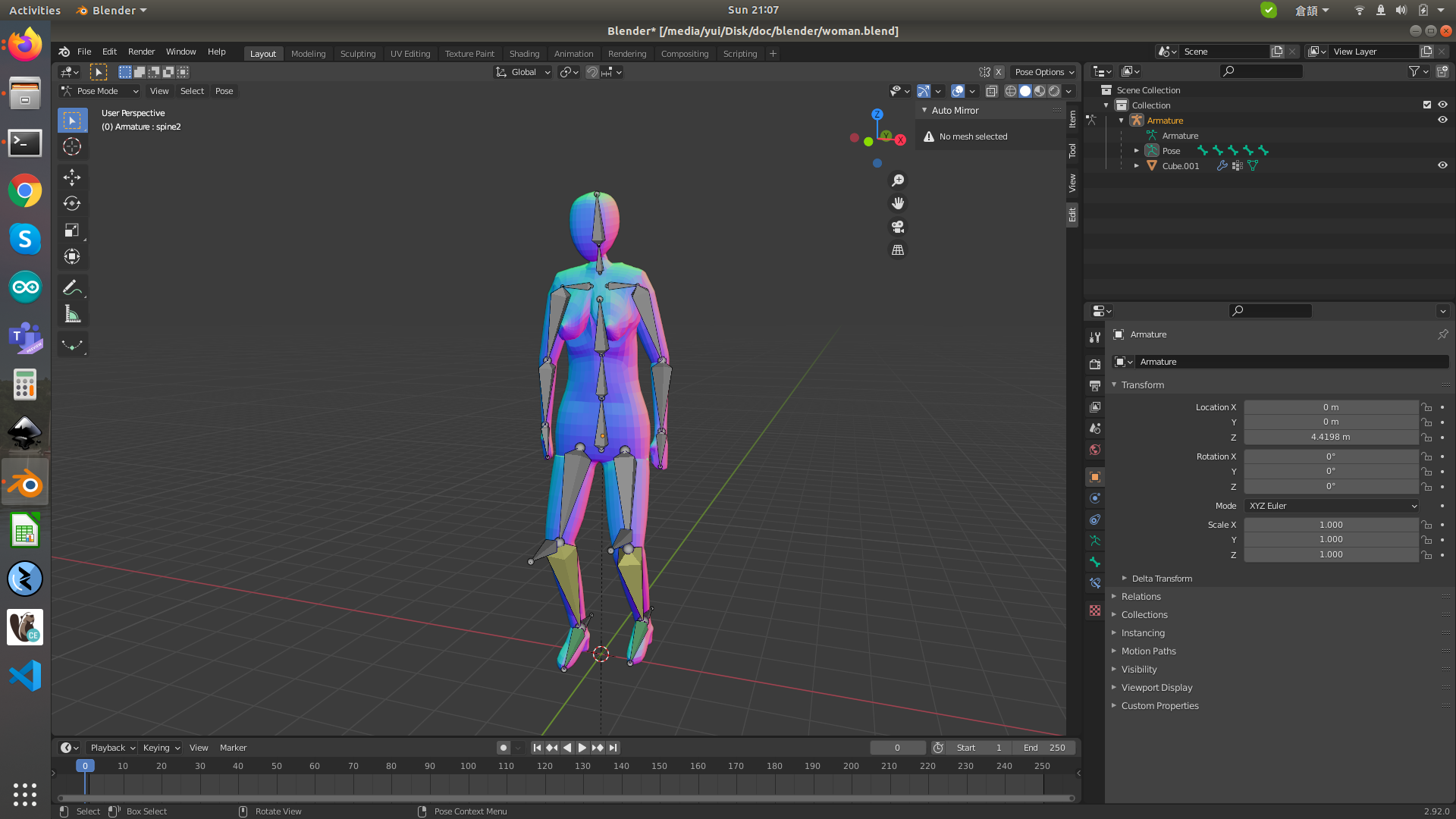
Blender 3D Modeling
Anime character 3D Model
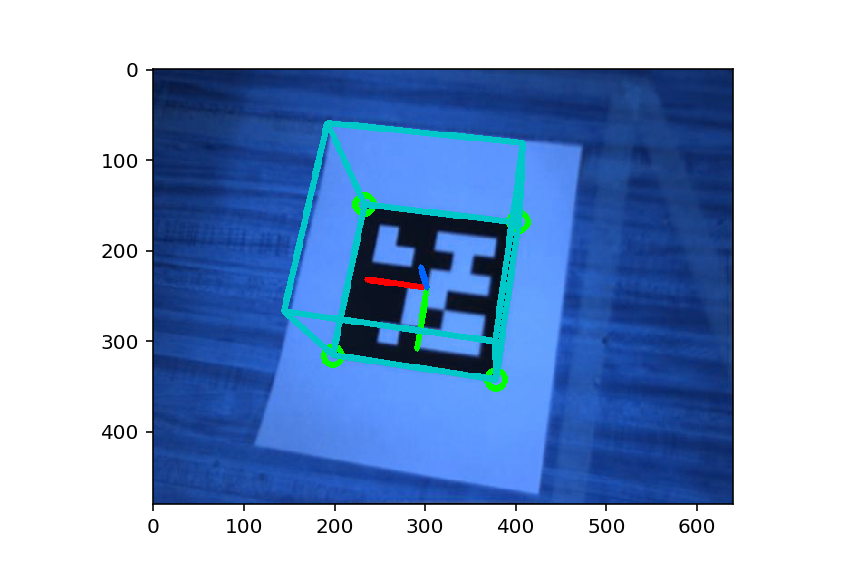
Augmented Reality
Project a cube as 3D object with homography method.
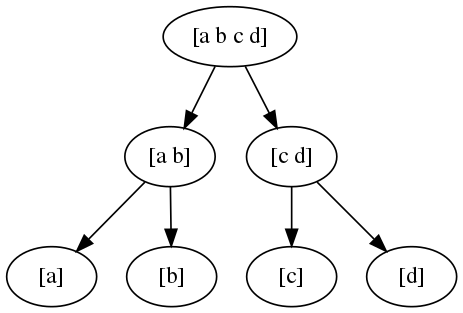
Algorithm -- Master Method
Estimate big O notation with Master Method.
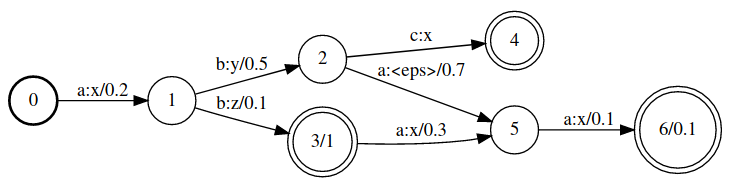
Finite State Transducer
Algorithms behind Grammarly and many text-correction engines.
Arm-Camera Callibration
Synchronize a robot arm with camera to reach specific endpoints.
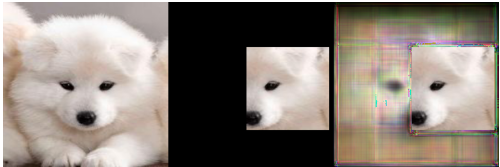
Image Extrapolation
To paint the dog based on constraints
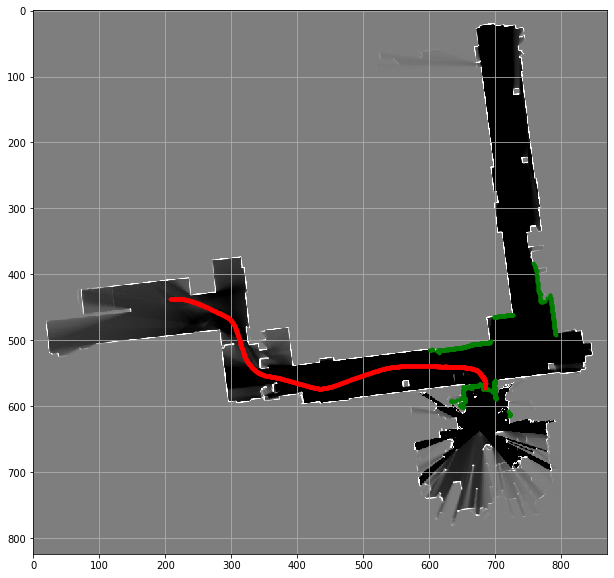
Particle Localization
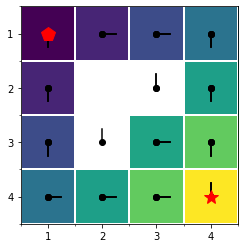
Value Iteration
Unity Game Development
Susceptible, Infectious, or Recovered model
A simulation to visualize how disease is spread.
Trajectory of quadcopter
A simulation to visualize how quadcopter traverses with PD control.
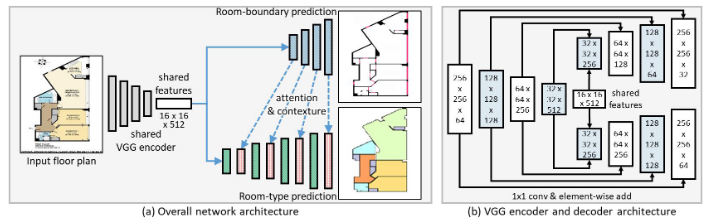
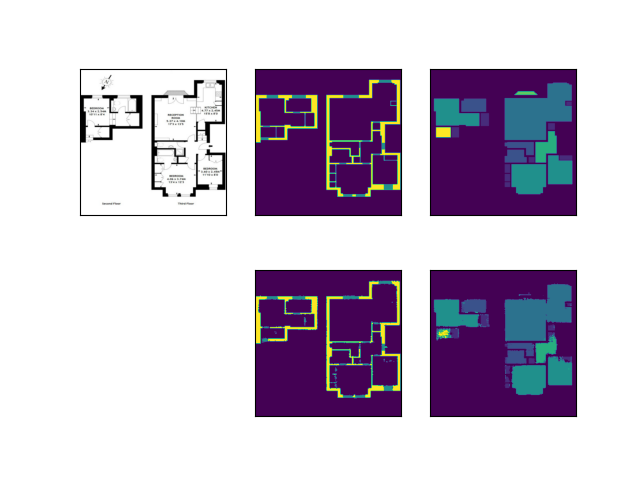
Deep Floor Plan
TF2 implemntation of research paper 'Deep Floor Plan Recognition Using a Multi-Task Network with Room-Boundary-Guided Attention'.
Minimum Spanning Tree