Transforming Mesh to Voxel
Before testing the 3d reconstruction algorithm, like point cloud, I would like a well-designed scenario. So that, I don't have to extract feature descriptors, but only focus on the design 3d reconstruction algorithm itself.
There are 3 useful resources, ShapeNet, gazebo and Unity3D. These provide well-defined 3d models, so that each point on the model can be used for simulating 2d camera view, and reconstruction.
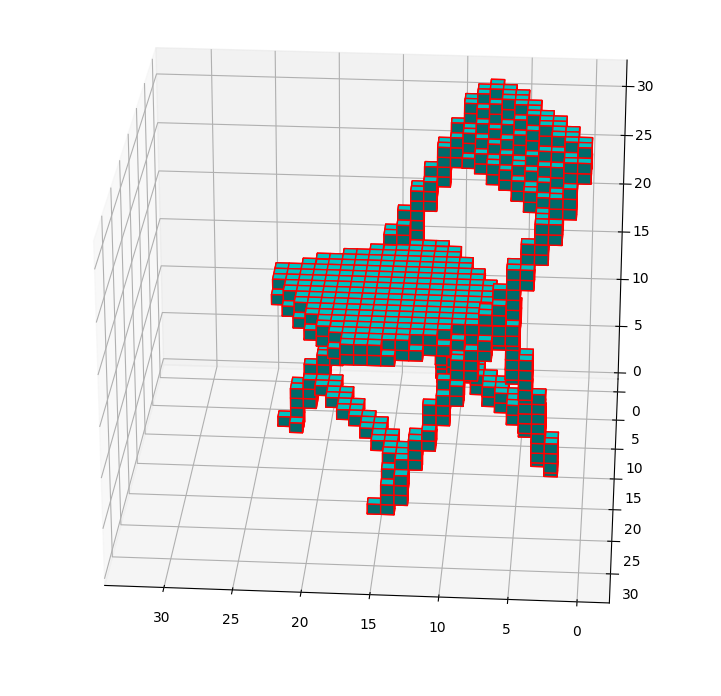

I rewrite the matlab script into python, to turn 3d model from .off file into the voxels form on the left.