ROS -- Create Wall Gazebo Environment
Examples
Refer to turtlebot gazebo package turtlebot3_gazebo, in order to spawn the environment, we usually run
roscore # T1
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch # T2
From the launch file, you can see it calls and spawns the target objects, one world and one robot.
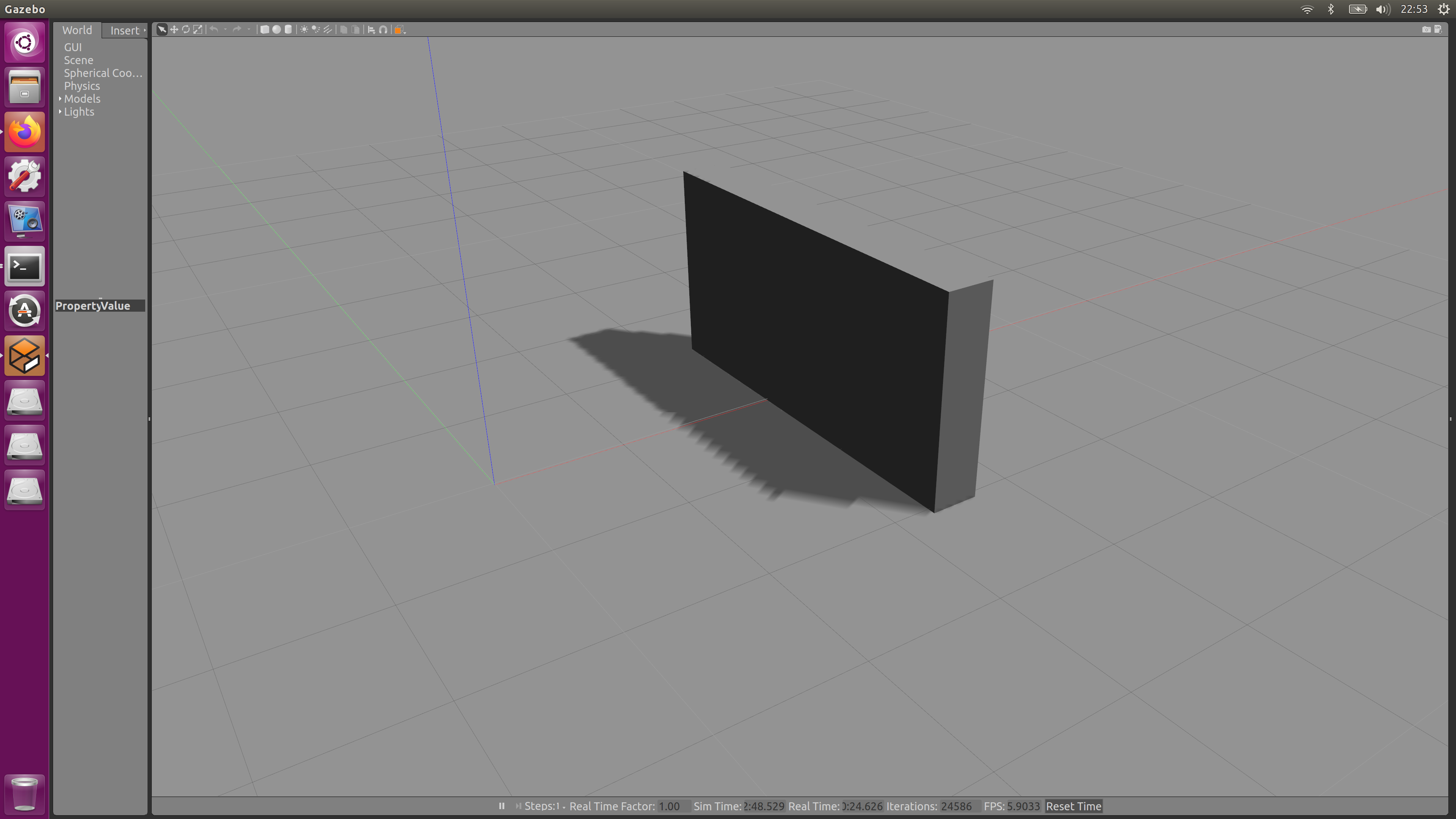
Create Gazebo World
- Open gazebo window, by
gazebo. - Click Box to place a box. Scale it with scale mode.
- Save World As (Shift+Ctrl+S) as wall.world.
- Place the world file into your package's worlds folder.
my_package/worlds/wall.world - You can view the world again by,
gazebo wall.world
Change Launch file
- Copy
turtlebot3_gazebo/launch/turtlebot3_empty_world.launchto your launch folder asturtlebot3_wall.launch. - Change the following line,
- This will change the world where the robot is placed.
<arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/empty.world"/>
to
<arg name="world_name" value="$(find my_package)/worlds/wall.world"/>
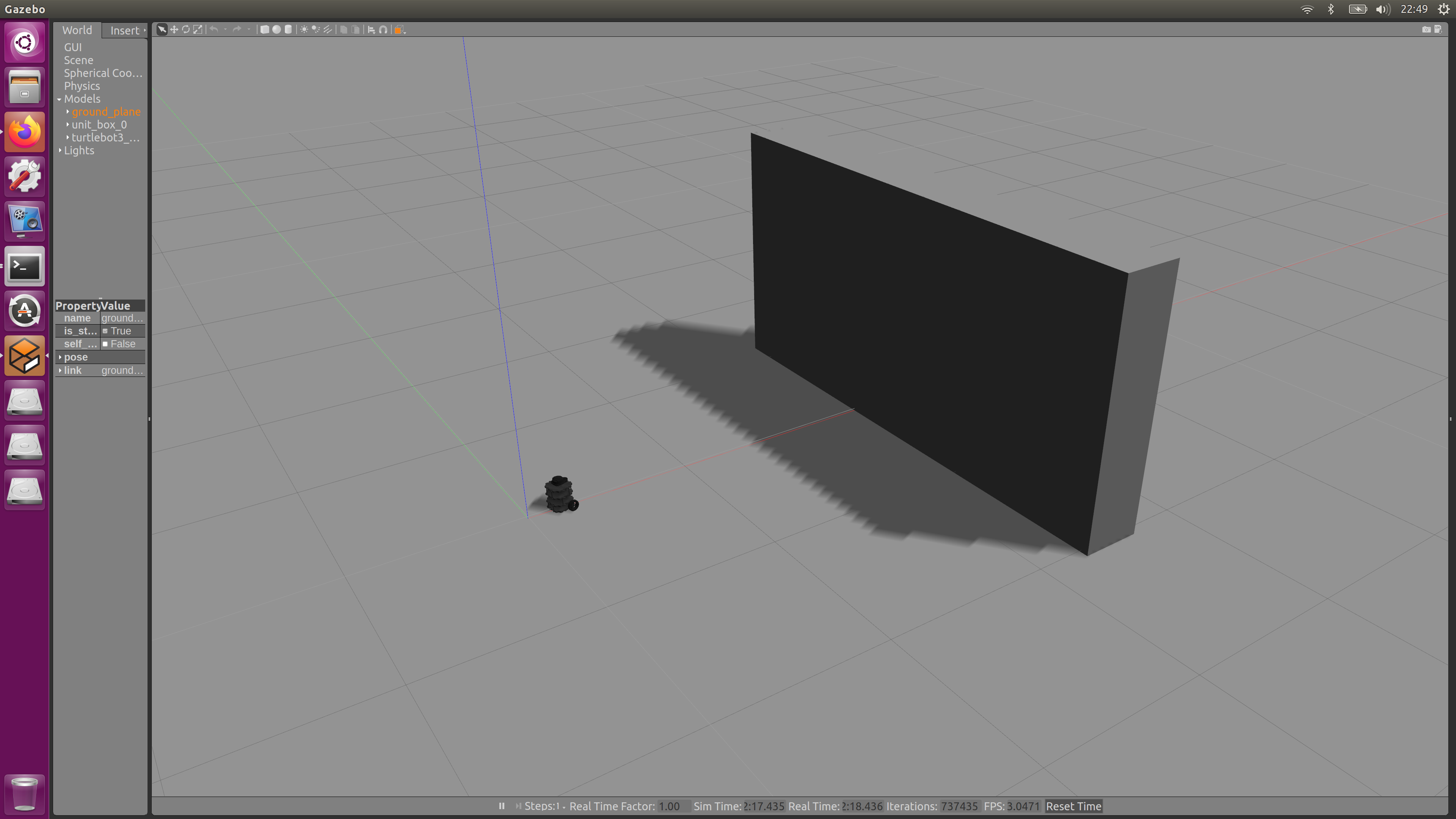
Run simulation
- Start your simulation by the followings,
- You may see if the robot collides with the box, the box bounces back. We may fix the box to the ground by editing the world file,
wall.world - Just include it in the first occurence of model name of unit box 0.
roscore # T1
roslaunch my_package turtlebot3_wall.launch # T2
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 1.0, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}' # T3
rosservice call /gazebo/reset_simulation "{}" # T3 to reset
<model name="unit_box_0">
<static>1</static>