ROS Simulation Camera
Steps
- Create package dependent on urdf.
sudo apt-get install libopencv-dev
cd ~/my_ws/src
catkin_create_pkg camera_test urdf sensor_msgs cv_bridge rospy std_msgs
cd ..
mkdir launch urdf
- Paste the files into their respective folders urdf and launch.
- Run the model in simulation by,
roscore
roslaunch gazebo_ros empty_world.launch
roslaunch camera_test spawn.launch
roslaunch camera_test rviz.launch
- Inside gazebo window, insert any models.
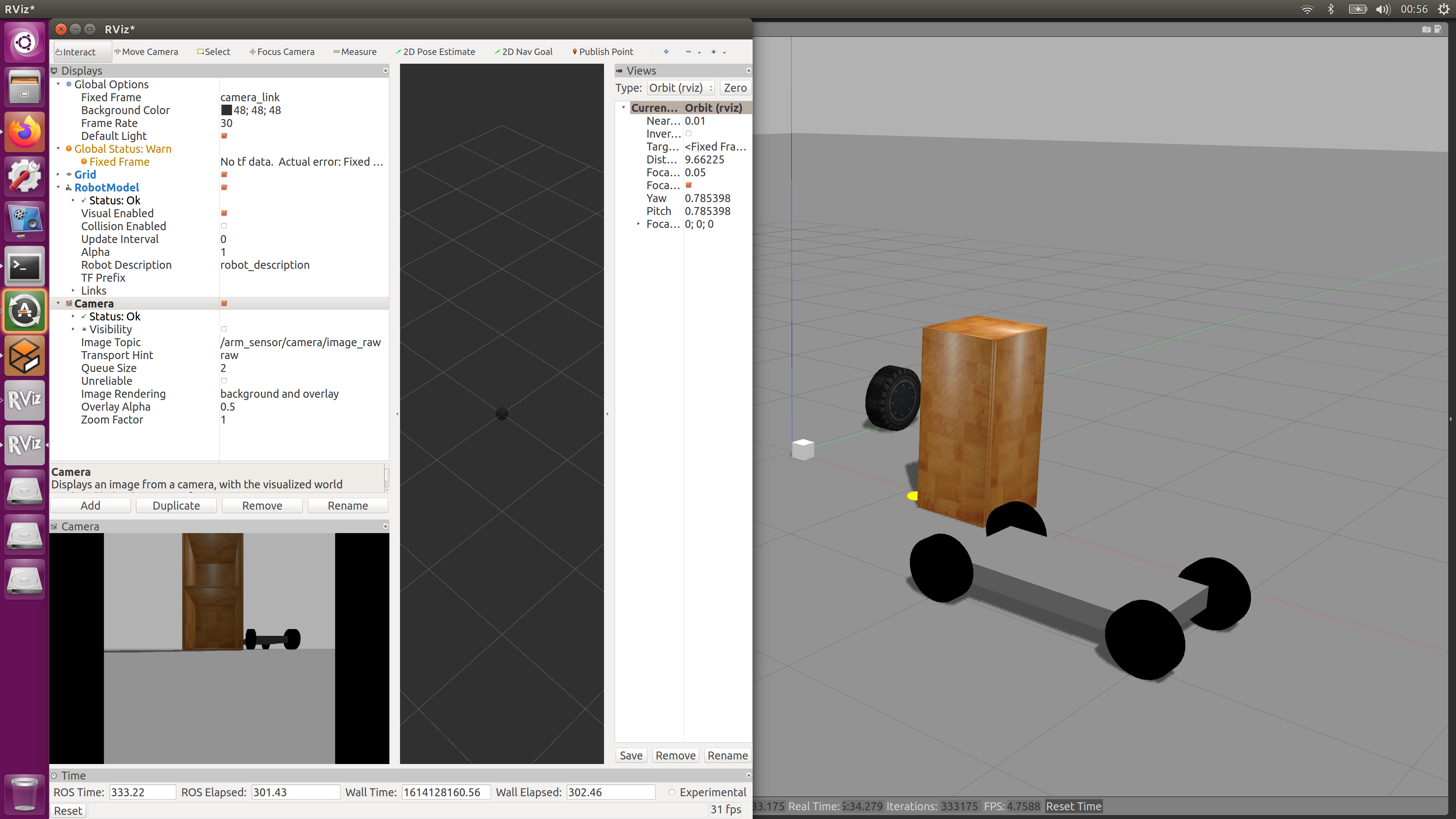
- Inside rviz window, add robotmodel and camera. Change Global Options Fixed Frame to camera_link, change Camera Image Topic to /arm_sensors/camera/image_raw
robot.urdf
<?xml version="1.0"?>
<robot name="my_robot" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:property name="M_PI" value="3.1415926535897931" />
<link name="camera_link">
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
<material name="grey">
<color rgba="0.2 0.2 0.2 1.0"/>
</material>
</visual>
<inertial>
<mass value="0.001" />
<origin xyz="0.1 0 0" rpy="0 0 0" />
<inertia ixx="0.0001" ixy="0" ixz="0" iyy="0.0001" iyz="0" izz="0.0001" />
</inertial>
</link>
<gazebo reference="camera_link">
<sensor type="camera" name="camera_camera_sensor">
<update_rate>30.0</update_rate>
<camera>
<pose>0.035 0 0.078 0 ${-M_PI/2} 0</pose>
<horizontal_fov>${85 * M_PI/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>1020</width>
<height>1020</height>
</image>
<clip>
<near>0.01</near>
<far>1000</far>
</clip>
</camera>
<plugin name="camera_camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>arm_sensor/camera</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
</robot>
spawn.launch
<?xml version="1.0" encoding="UTF-8" ?>
<launch>
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find camera_test)/urdf/robot.urdf'"/>
<arg name="x" default="0"/>
<arg name="y" default="0"/>
<arg name="z" default="1.5"/>
<node name="my_robot_spawn" pkg="gazebo_ros" type="spawn_model" output="screen"
args="-urdf -param robot_description -model my_robot -x $(arg x) -y $(arg y) -z $(arg z)"/>
</launch>
rviz.urdf
<?xml version="1.0" ?>
<launch>
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find camera_test)/urdf/robot.urdf'"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="use_gui" value="False"/>
</node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher"/>
<node name="rviz" pkg="rviz" type="rviz"/>
</launch>
References
- ROS Answers -- Adding a camera to a model in Gazebo? (Beginner)
- Gazebo plugins in ROS
- Converting between ROS images and OpenCV images (Python)
- Adding a camera to my urdf
- urdf/XML/joint